
Encoder là gì?
Rotary Encoder là gì? Encoder có phải là bộ đếm, đo vận tốc, xác định góc quay của động cơ? Bạn đang tìm hiểu về thiết bị Encoder? Cấu tạo và nguyên lý hoạt động như thế nào? Có bao nhiêu loại Encoder? Tín hiệu ngõ ra của Encoder là tín hiệu nào? Cách kết nối tín hiệu với bộ đọc ra sao? Nội dung bài viết này xin chia sẻ đến quý vị và các bạn các câu hỏi trên.

Hình 1 : Thiết bị Encoder thường dùng
Encoder là thành phần quan trọng của động cơ, giúp chúng ta đọc được tốc độ và vị trí của động cơ, nhờ các xung vuông có tần số thay đổi phụ thuộc vào tốc độ của động cơ.
Trong ngành gia công cơ khí chính xác. Máy CNC là thiết bị được dùng gia công cơ khí chính xác hoàn toàn tự động. Để điều khiển và xác định các góc quay của dao hoặc bàn gá, hiển thị trên máy tính là đường thẳng hoặc góc bao nhiêu độ. Thì bên trong các cánh tay robot máy CNC được bố trí các Encoder làm nhiệm vụ trên.
Cấu tạo Encoder
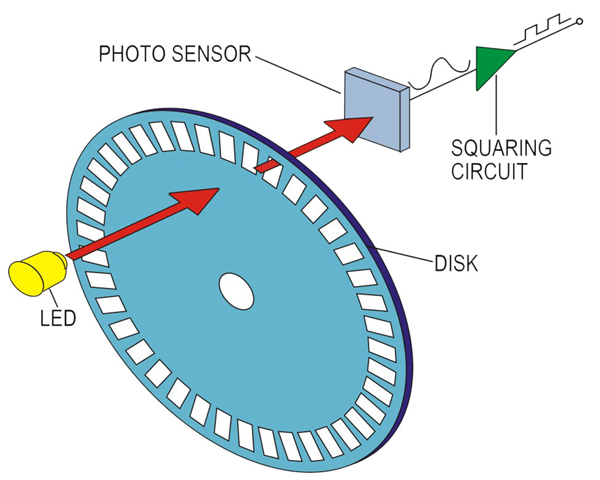
Hình 2 : Cấu tạo Encoder
Cấu tạo Encoder cũng khá đơn giản bao gồm : Một đĩa tròn có các lỗ (rãnh) như hình xoay quay quanh trục cố định. Một đèn LED được bố trí gần đĩa xoay, và một cảm biến ánh sáng phía đối diện.
Nguyên lý hoạt động của Encoder (tương đối)
Encoder hoạt động trên nguyên lý đĩa quay quanh trục, trên đĩa có các rãnh để tín hiệu quang chiếu qua đĩa (Led). Chỗ có lỗ (rãnh) thì ánh sáng xuyên qua được, chỗ không có lỗ (rãnh) ánh sáng không xuyên qua được.Với các tín hiệu có, hoặc không có ánh sáng chiếu qua, người ta ghi nhận được đèn led có chiếu qua lỗ hay không. Số xung đếm được và tăng lên nó tính bằng số lần ánh sáng bị cắt. Cảm biến thu ánh sáng sẽ bật tắt liên tục => tạo ra các xung vuông. Việc sử dụng các bộ mã hóa sẽ ghi nhận lại số xung và tốc độ xung. Tín hiệu dạng xung sẽ được truyền về bộ xử lý trung tâm như : vi xử lý hoặc PLC,… người điều khiển sẽ biết được vị trí và tốc độ của động cơ.
Xác định chiều quay của động cơ như thế nào?
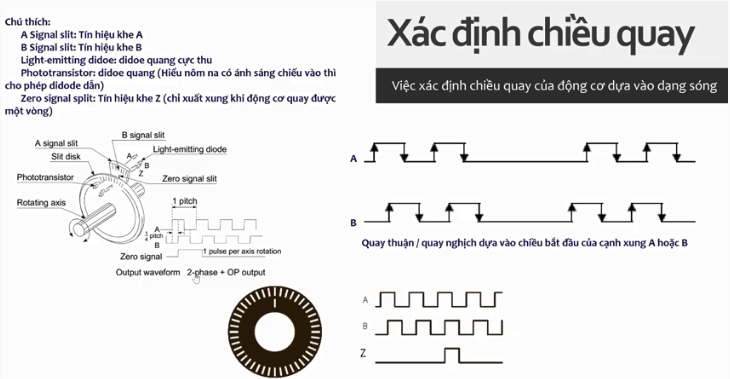
Hình 3 : Xác định chiều quay của động cơ
Thông thường Encoder có 2 tín hiệu xung A và B giúp chúng ta xác định chiều quay của động cơ. Tín hiệu khe Z là tín hiệu chỉ xuất ra khi động cơ quay được một vòng.
Để xác định chiều quay của động cơ. Các bạn xem hình 3 phía trên bên trái (hình hơi bé các bạn thông cảm). Khi đèn LED phát tín hiệu. Hai pha A và B có nhiệm vụ thu tín hiệu. A và B sẽ tạo ra các xung vuông bật tắt theo trình tự. Sự chênh lệch tần số xung giữa A và B ta có thể phân biệt được chiều quay của động cơ. Xem hình bên phải pha A có chu kỳ trước pha B. Ta quy ước đó là chiều thuận và ngược lại.
Encoder thường có 6 dây hoặc 4 dây tùy loại. Các dây bao gồm : 2 dây nguồn, 2 dây pha A và B, 1 dây pha Z. Dựa vào 2 dây A và B ta xác định được số vòng quay, vận tốc, chiều quay của động cơ. Để lập trình xử lý tín hiệu encoder, bạn có thể nối 2 dây tín hiệu A và B vào 2 chân timer hoặc ngắt ngoài của vi điều khiển, thiết lập vi điều khiển ở chế độ counter, vi điều khiển sẽ đếm xung từ vi điều khiển.
Vị trí lắp đặt Encoder như thế nào?
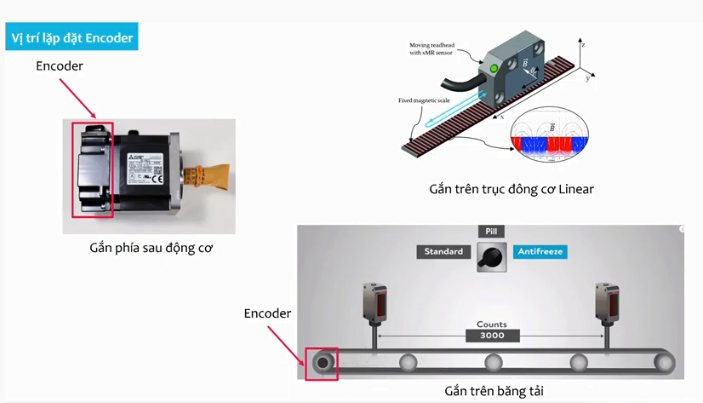
Encoder thường được lắp đặt 3 vị trí cơ bản :
- Lắp phía sau động cơ Servo
- Gắn trên trục động cơ Linear, ứng dụng cho các chuyển động tịnh tiến
- Gắn trên băng tải : xác định tốc độ của băng tải,…
Phân loại Encoder
Theo nguyên lý hoạt động có 2 loại :
- Encoder tuyệt đối (Absolute Encoder) : điểm khác biệt của Encoder tuyệt đối là đĩa quay được làm bằng vật liệu trong suốt, người ta chia mặt đĩa thành các góc đều nhau và các đường tròn đồng tâm.
- Encoder tương đối (Incrememtal Encoder) đã trình bày ở phần nguyên lý và cấu tạo của Encoder là gì?
Phân loại Encoder theo công nghệ :
- Magnetic (loại từ trường)
- Mechanical (loại cơ khí)
- Resistive (loại điện trở)
- Optical (loại quang)
Encoder được sử dụng ở đâu?
Trong ngành sản xuất các sản phẩm được cuộn lại như ngành nhựa, bao bì,…Số lượng sản phẩm được quy đổi bằng mét. Encoder được dùng để đo số mét sản phẩm, theo nguyên lý đo vòng quay của trục rulô.
Encoder được ứng dụng nhiều nhất để đo tốc độ và vòng quay của động cơ Servo. Encoder thường đi kèm với động cơ Servo luôn.



